Nonlinear Model Predictive Control
Provably stable formualtions
Relaxing the N-reachability assumption
For more details, refer to the [paper].
Weighted increment-based formulation for economic MPC
For more details, refer to the [paper].
Formulation with exponentially increasing penalty
For more details, refer to the paper.
Contractive formulation without stability-related terminal constraint
For more details, refer to the paper.
NMPC admissibility dashboard
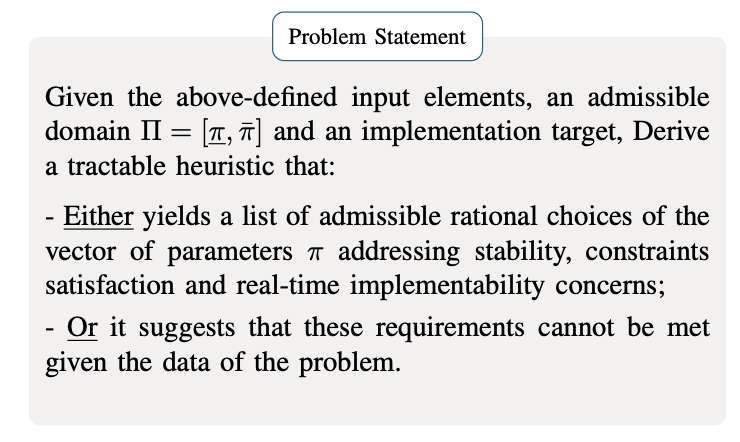
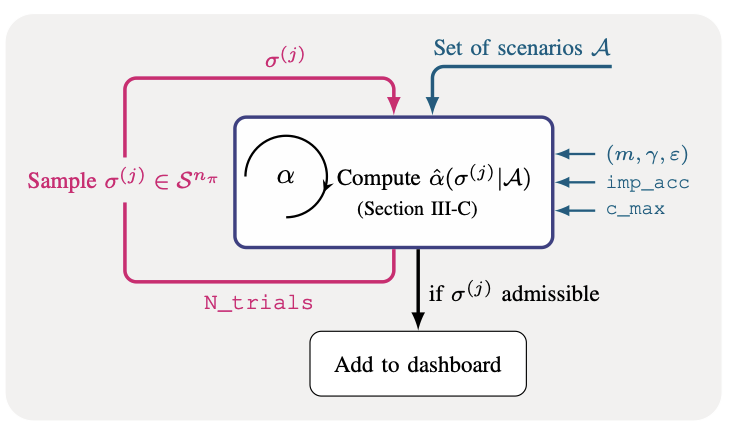
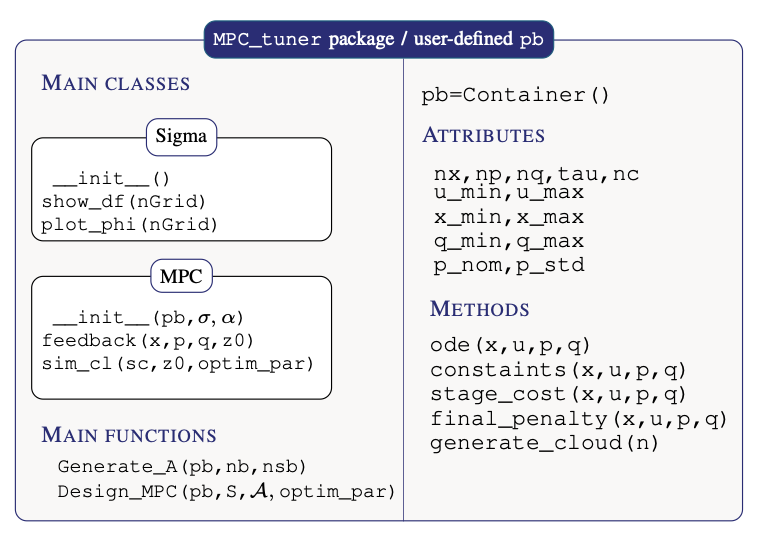
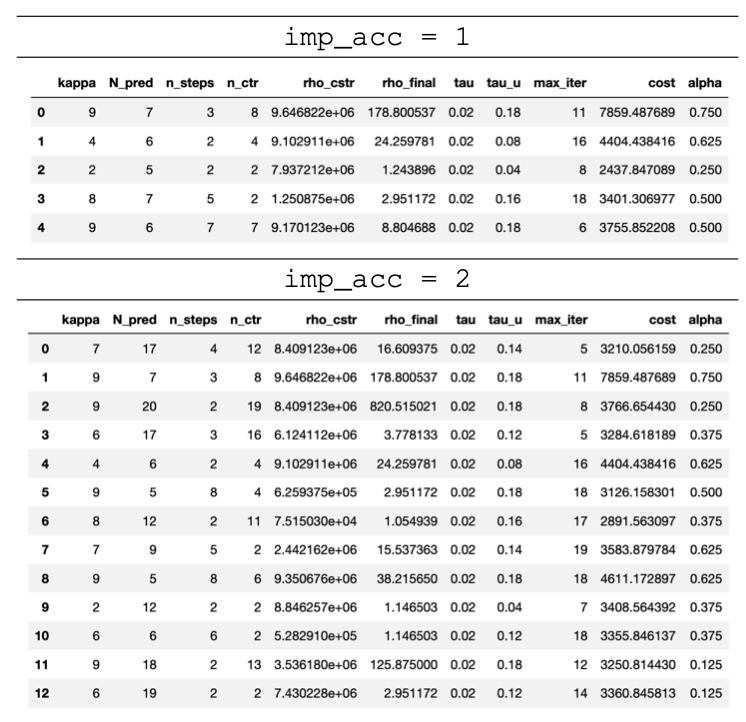
For more details, refer to the [paper].
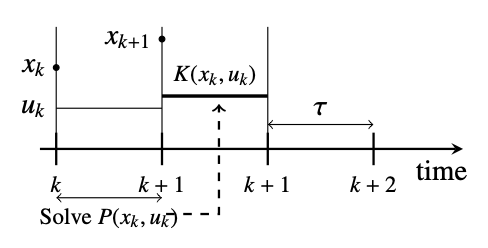
Real-time considerations
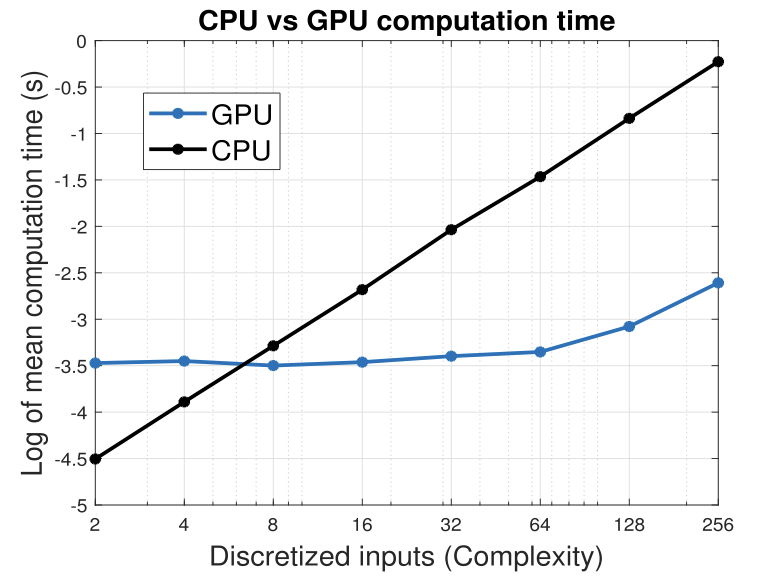
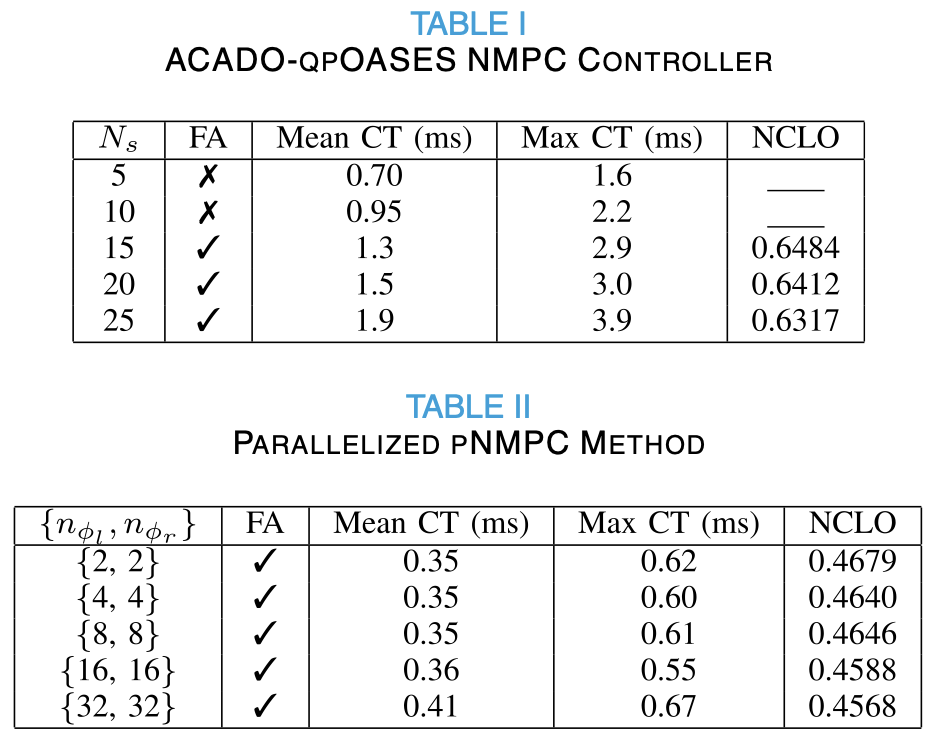
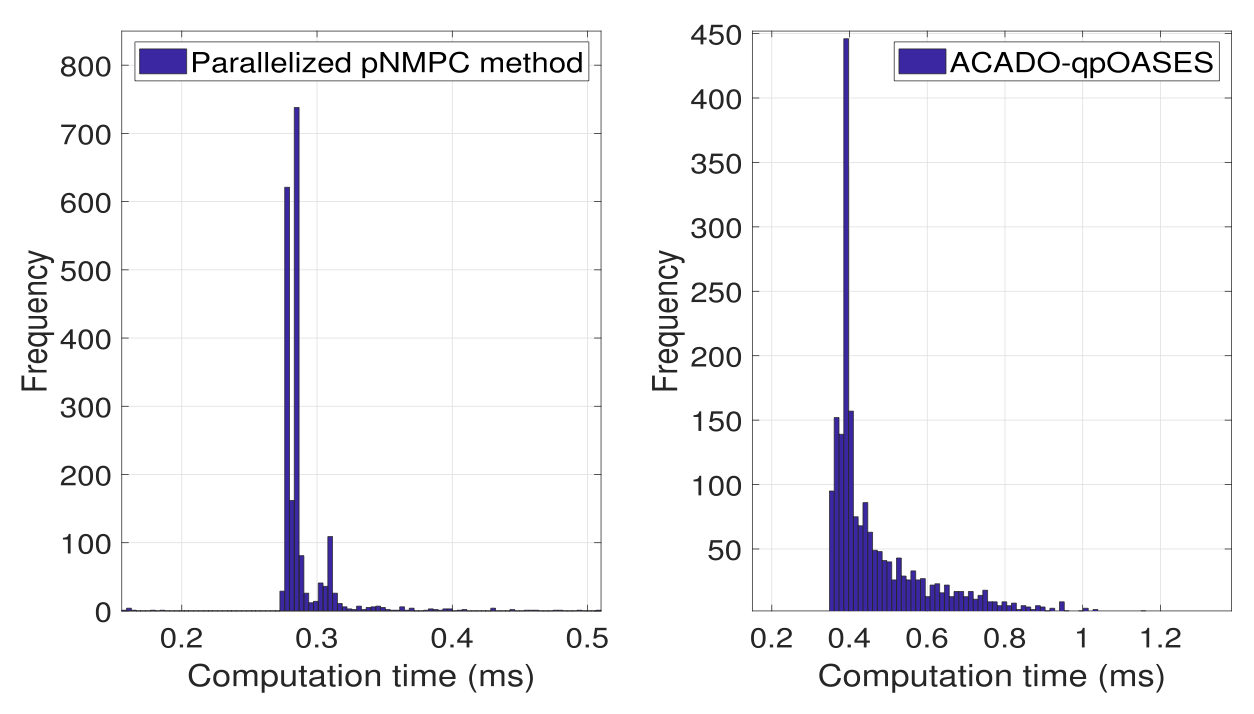
GPU-Based parmeterized NMPC applied to semi-active suspension system
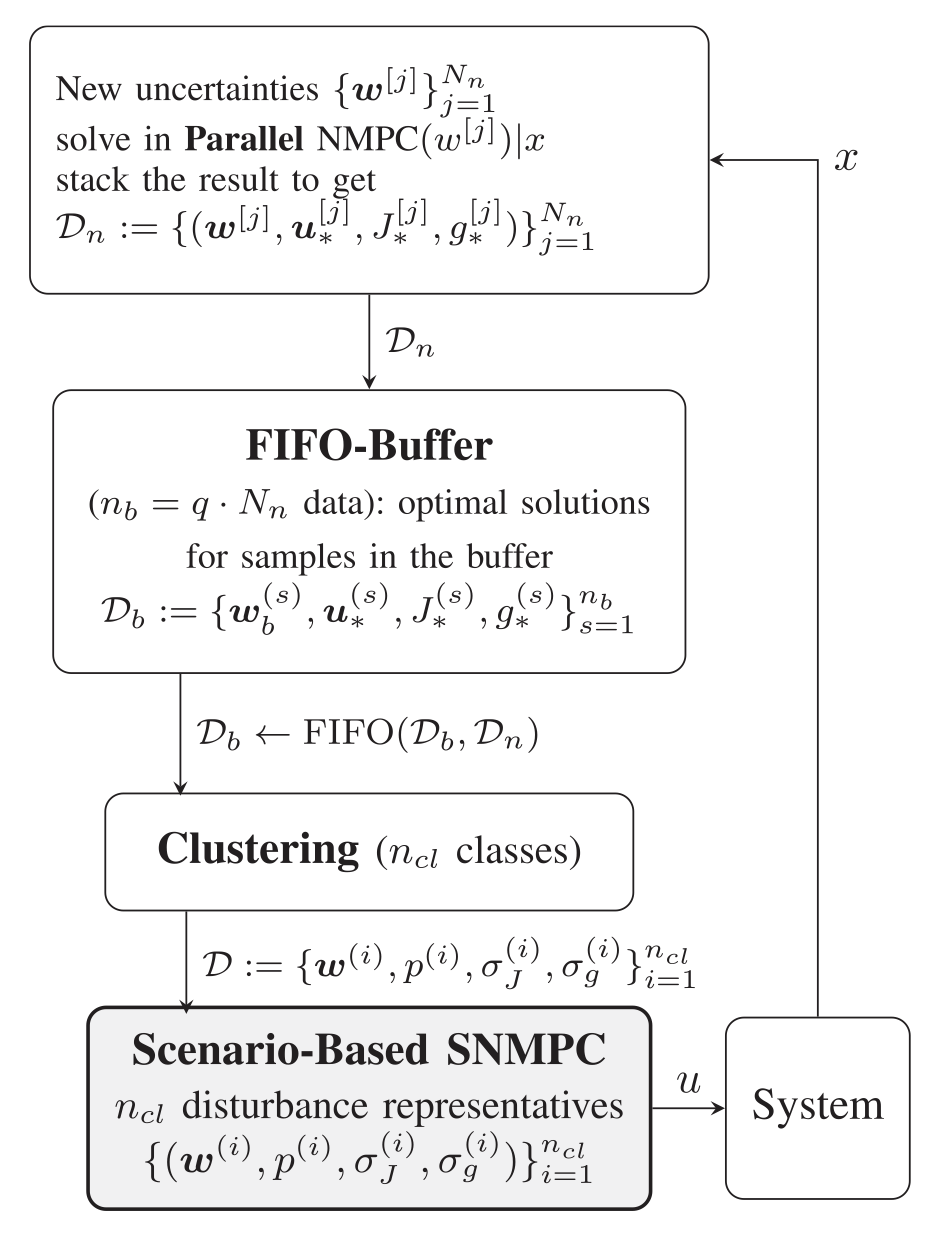
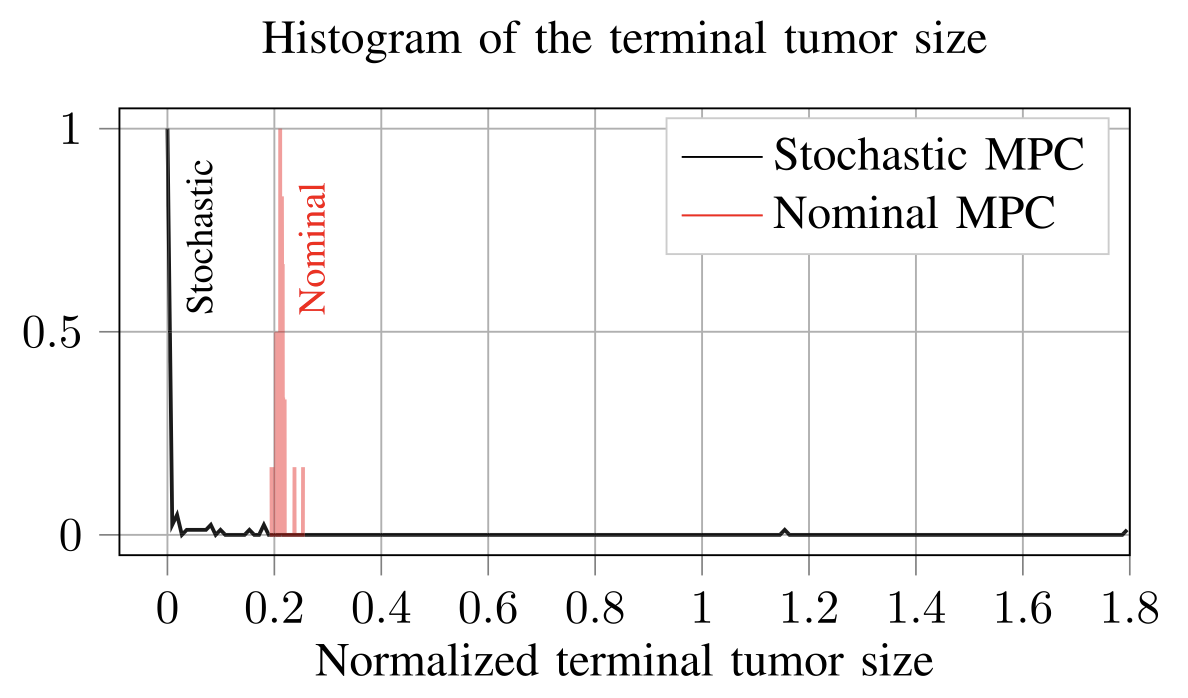
Stochastic MPC by supervised clustering
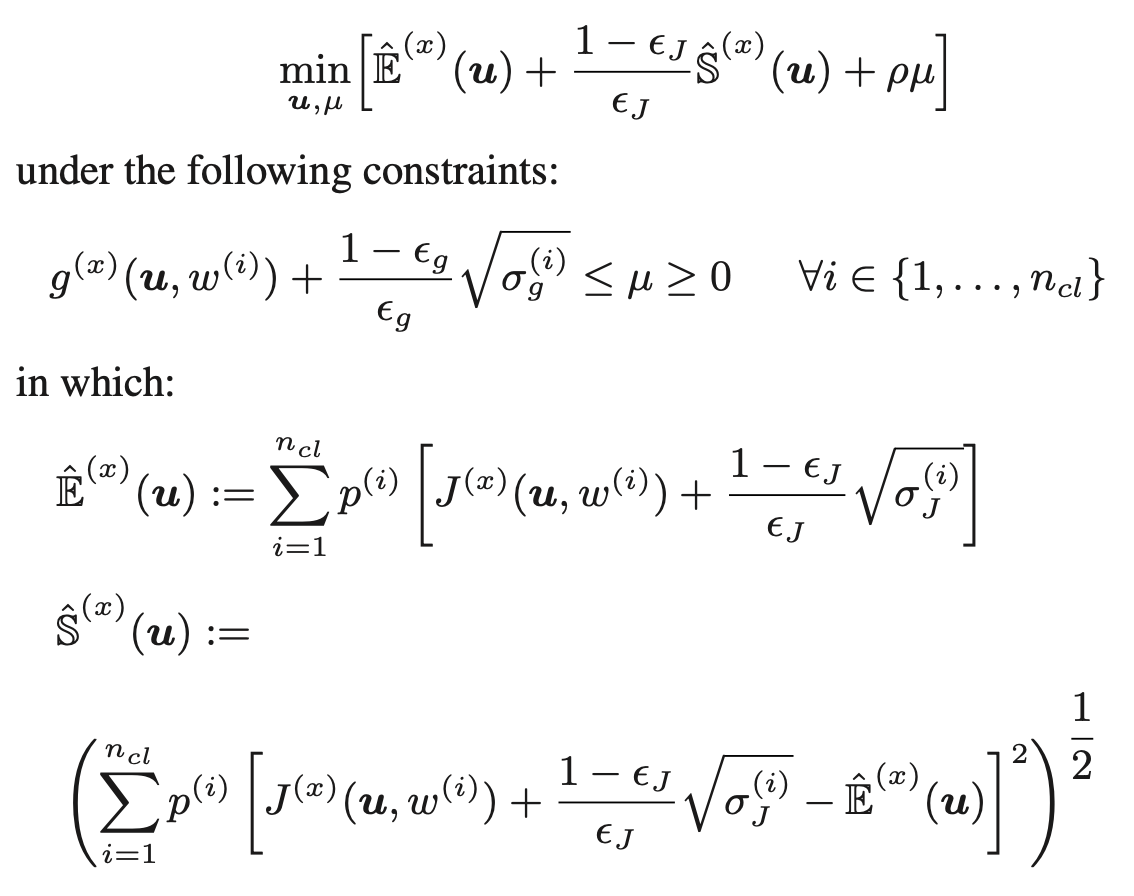
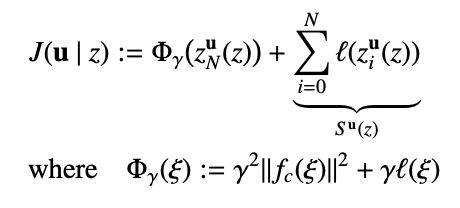
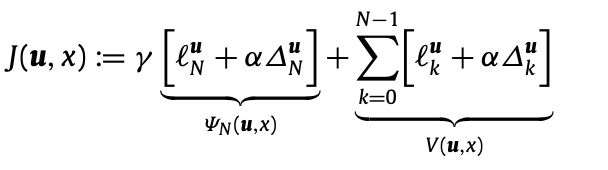
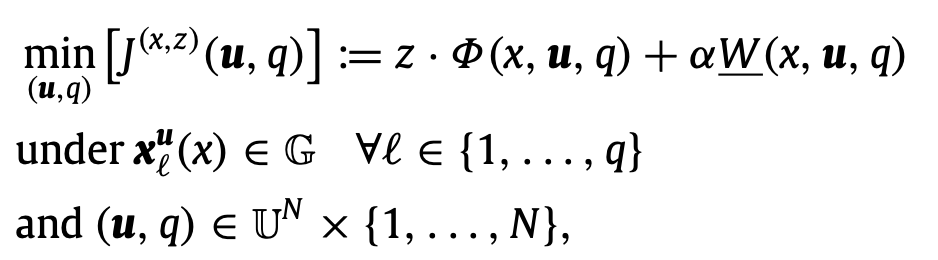
Cost Function

For more details, refer to the [paper].
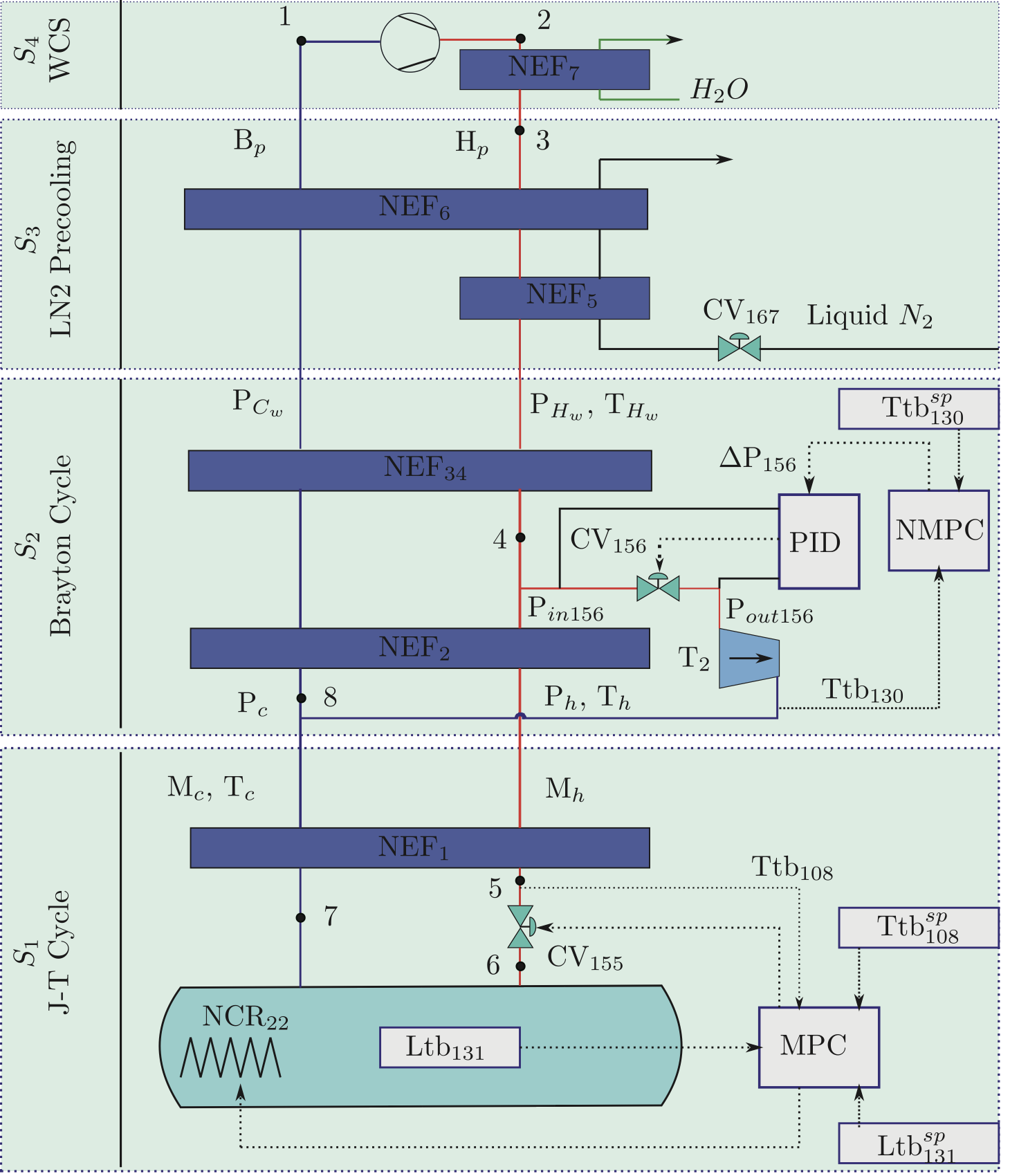
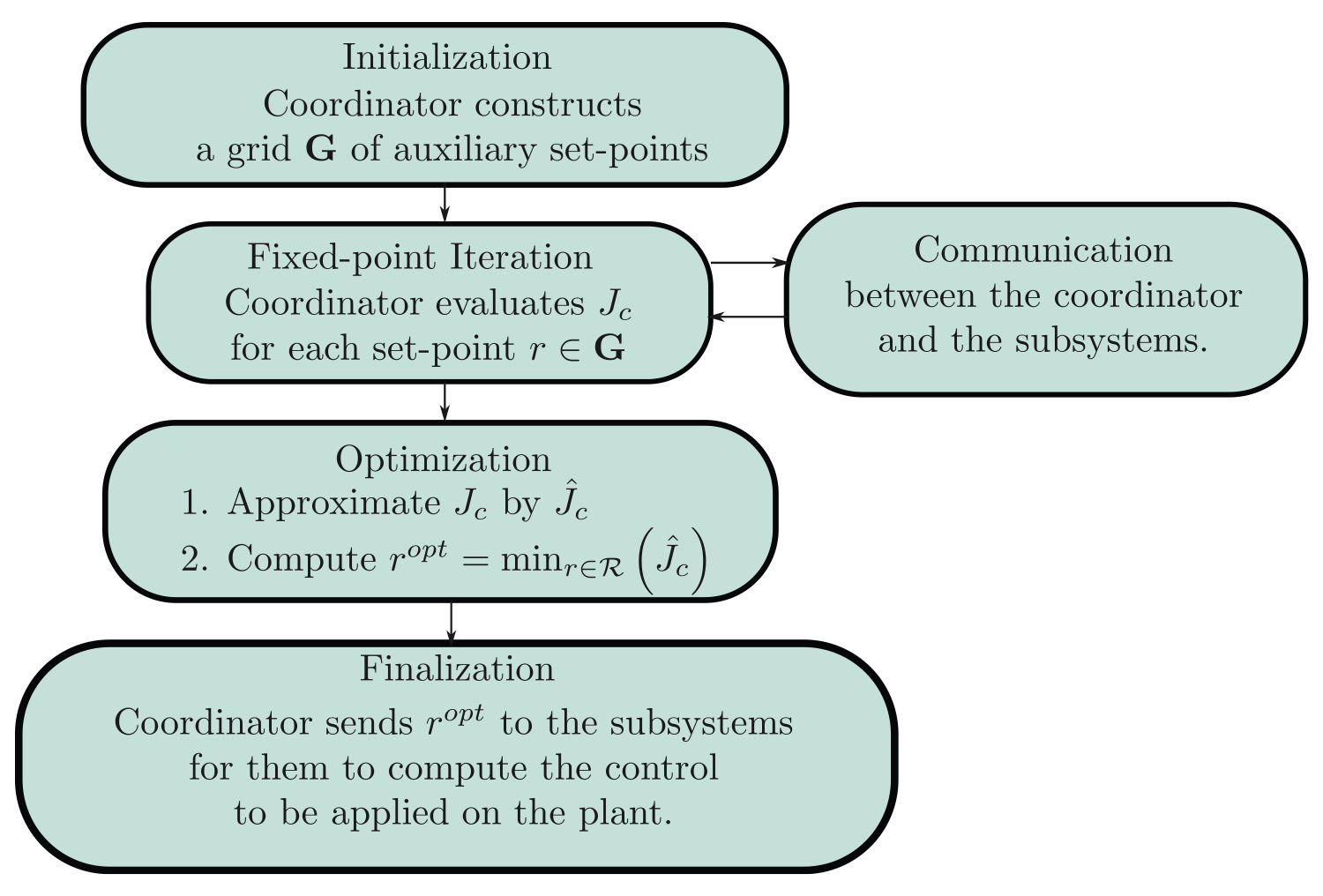
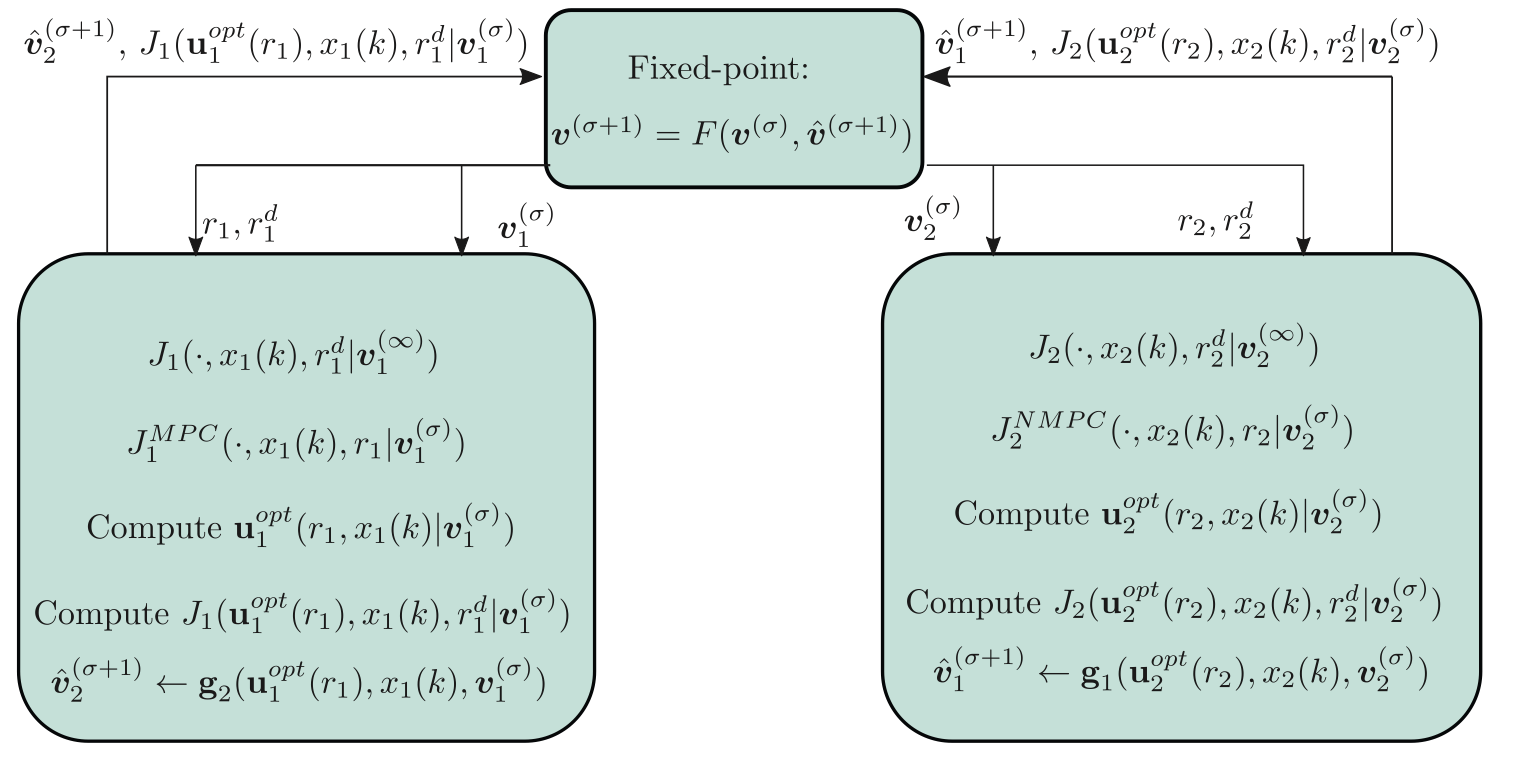
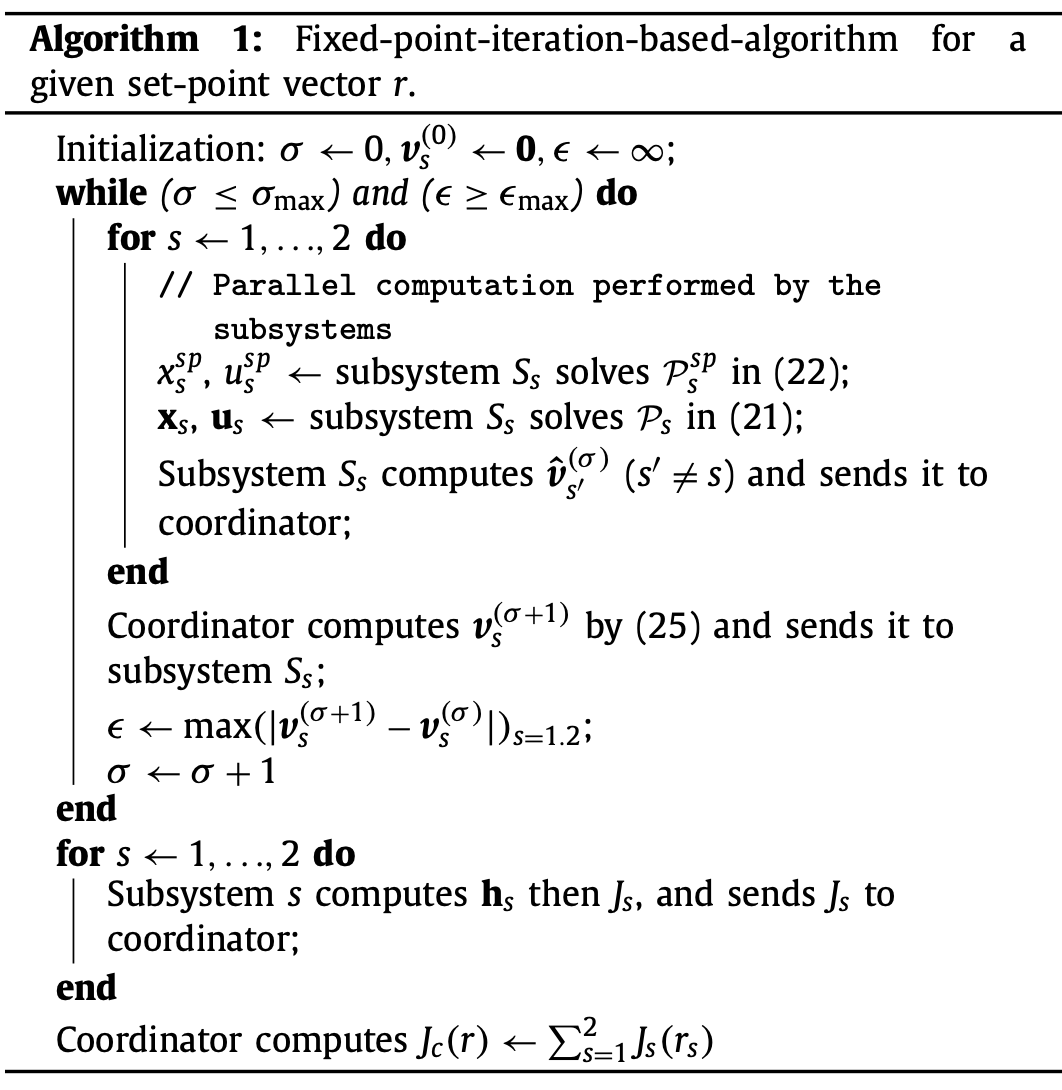
Hierarchical NMPC: Application to cryogenic refrigerators
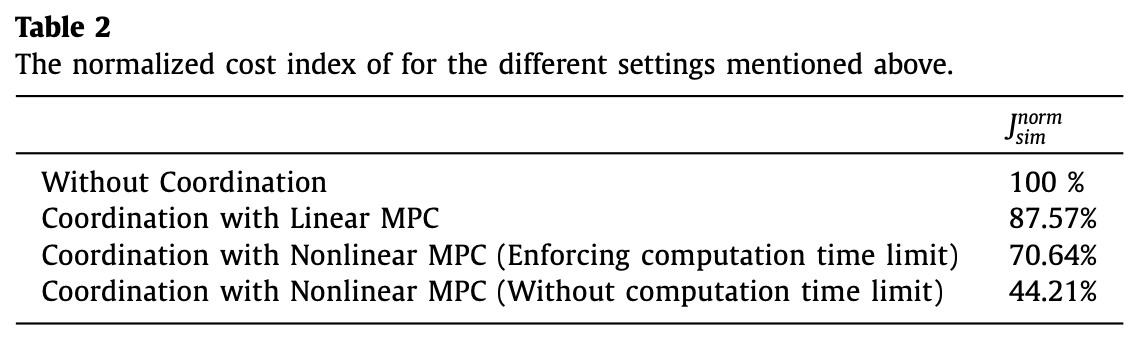
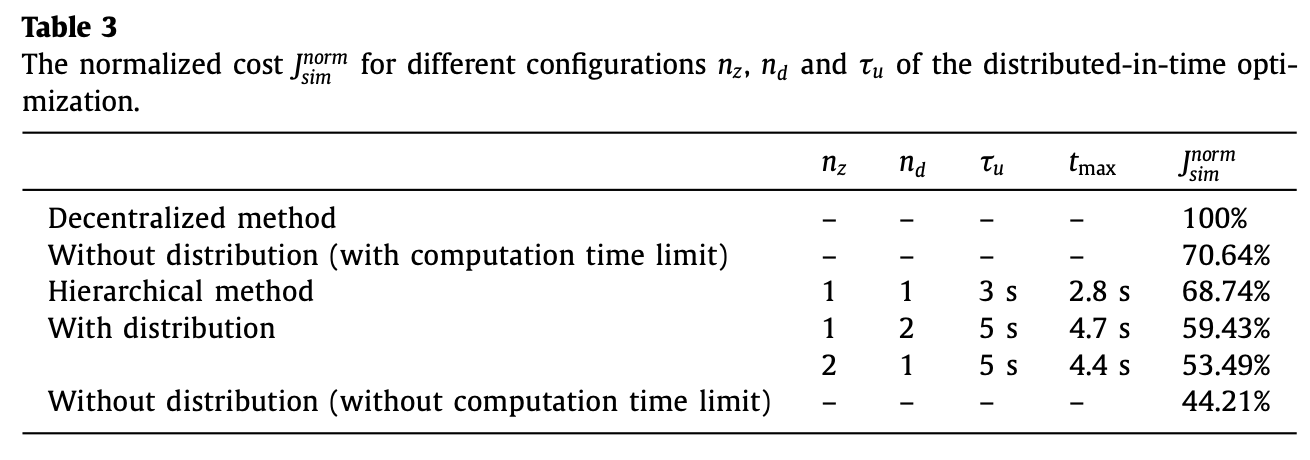
Achieved closed-loop cost under different settings of the controller. (a) without distributing the computation time over the system’s lifetime (b) under different setting of the distribution-in-time implementation.
For more details, refer to the [paper]. Notice that this work is an extension of [a previous work] which tackled only a network of unconstained linear dynamical system. The work presented here extends the previous one to networks of possibly nonlinear system involving general constraints.