plars | use-case (1)
Identification of the torque function for inverse model of a 4-axis manipulator robot

1 Dataset
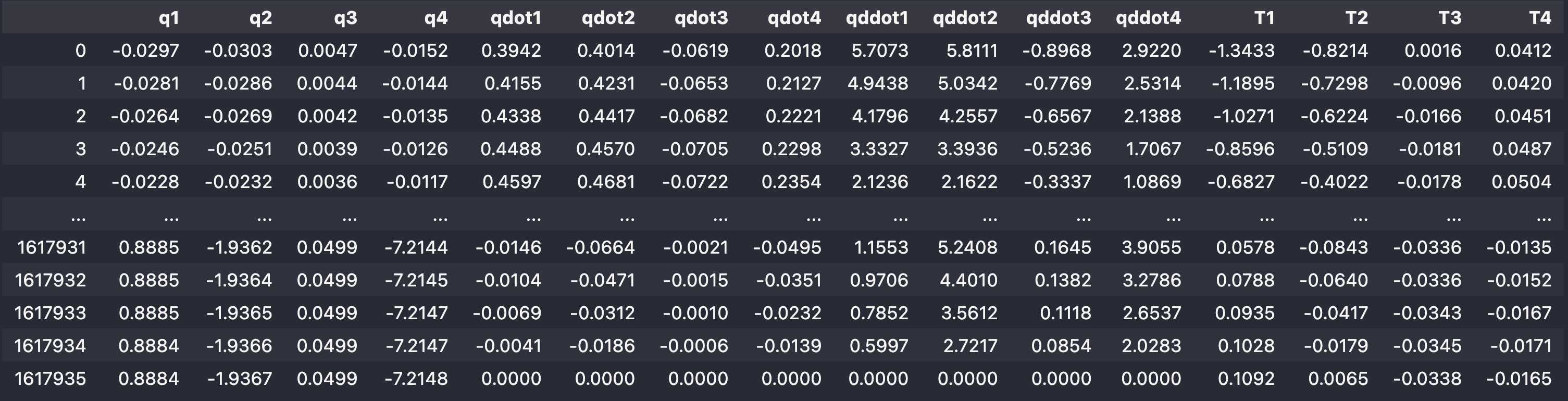
We have the following dataframe representing the recording of kinematic variables and the torques at the axis joints:
\[ \{q_i\}_{i=1}^4,\quad \{\dot q_i\}_{i=1}^4, \quad\{\ddot q_i\}_{i=1}^4,\quad \{T_i\}_{i=1}^4 \]
of a 4-axis manipulator robot.
2 Problem statement
Find a sparse polynomial relationship \(P\) such that \[ T_1 \approx P\bigl(x\bigr)\quad \vert\quad x:= \begin{bmatrix} q\cr \dot q\cr \ddot q \end{bmatrix}\in \mathbb R^{12} \] The relationship \(P\) should be fitted using only \(10\%\) of the data1 and tested on the remaining \(90\%\) of the data.
3 Solution and Results
The following script creates an instance of the PLARS class and look for a polynomial of degree 3.
import numpy as np
from mizopol.plars_api import fit
# call and fit parameters
dic_plars = dict(window=1000, deg=3, nModels=10, nModes=15, eps=1e-2)
dic_plars_fit = dict(compute_contributions=True)
# solve the problem
sol, cpu = fit(X[0:nTrain], y, dic_plars=dic_plars, dic_plars_fit=dic_plars_fit)
print('number of rows in the training data = ', len(ytrain))
print('number of eligible monomials', sol['nfeat'])
print('Number of monomials used = ', sol['card'])
print(f'cpu = {sol["cpu"]:3.4} sec')The printed results are
number of rows in the training data = 161793
number of eligible parameters 455
Number of monomials used = 101
cpu = 1.756 secNow we use the predict method of the PLARS class in order to computed the torque on the test unseen dataset2.
from mizopol.plars_api import predict
nJump = 10
ypred, cpu = predict(X[nTrain:], sol)This solution has been found in less than 2 sec!
It is possible to zoom on the figure in order to appreciate the quality of the prediction provided by the fitted sparse polynomial.
4 Contributions of monomials
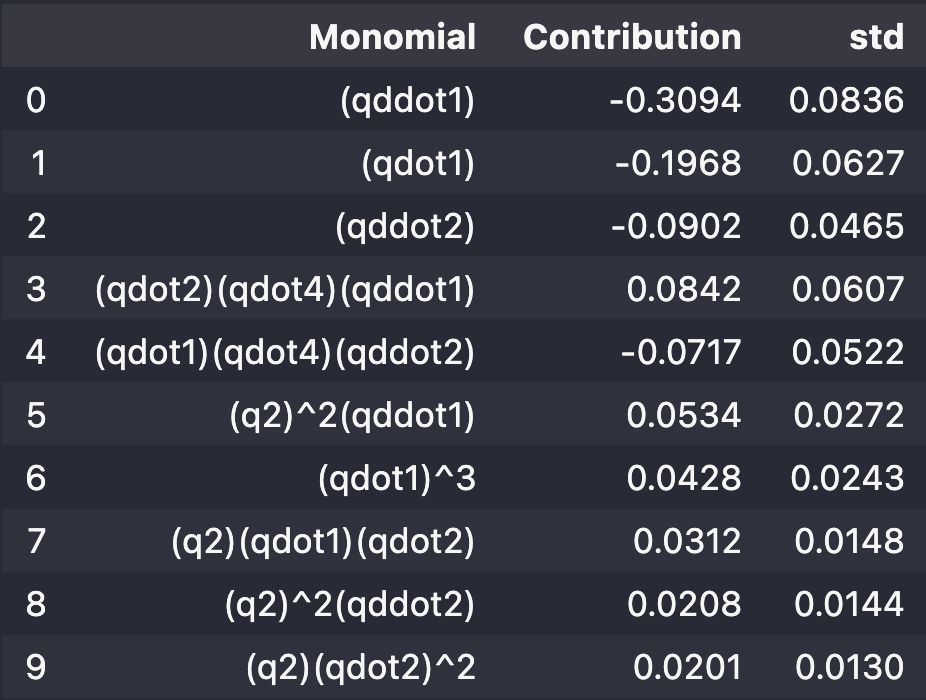
Using the monomials_contrib function available in the plars module, it is possible to rank the relative contributions of the monomials selected by the solver during the fit process to be incorporated in the solution sol.
In the following results these contributions are examined using the train and the test datasets successively.
- The similar results in the two datasets suggests the relevance of the estimated contributions.
- Notice the prevalence of the two most important monotmials are precisely \(\ddot q_1\) and \(\dot q_1\) which seem relevant given that the targeted label is the torque applied to the fist axis.
from mizopol.plars_api import monomials_contrib
df_Contrib = monomials_contrib(df[colXq].iloc[0:nTrain], sol, win=pl.window)
df_Contrib.reset_index(drop=True).iloc[0:10]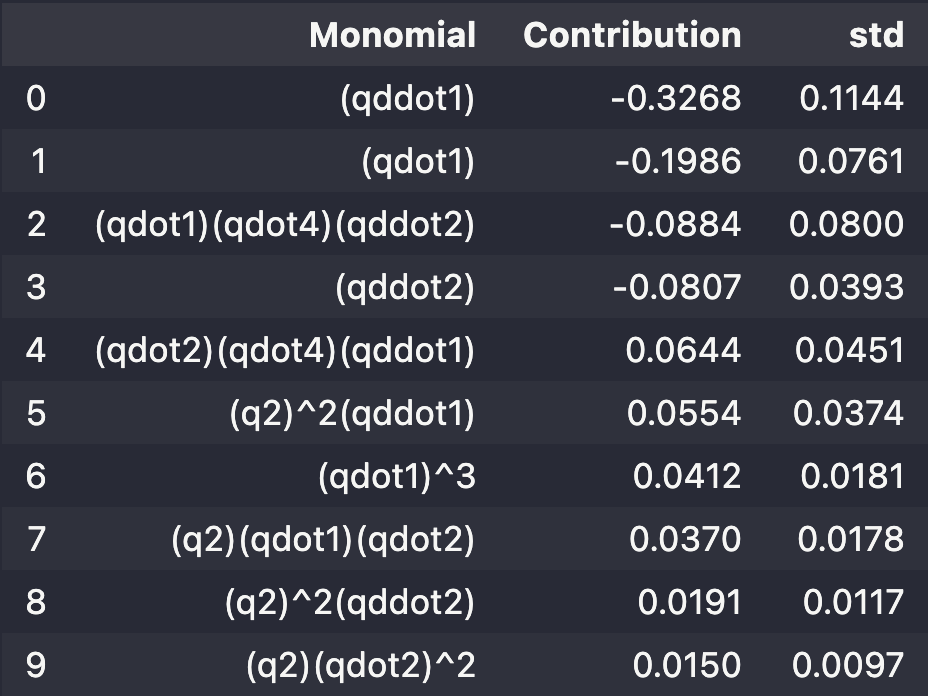
from mizopol.plars_api import monomials_contrib
df_Contrib = monomials_contrib(df[colXq].iloc[nTrain:], sol, win=pl.window)
df_Contrib.reset_index(drop=True).iloc[0:10]