xpwpol
Example of explicit piewe-wise polynomial representation of a manipulator robot.

We consdier the same manipulator robot that is used in the plars section and the pwpol section in order to illustrate the use of the xpwpol module.
Notice that regarding the script provided in the present section, they are provided to give a brief illustration. For the detailed description of the syntax and the available parameters, please refer to the related API-documentation section.
1 Data Preparation
df_robot = pd.read_csv('../datasets/robot_staubli_4axes.csv', index_col=0)
test_size = 0.8
nTrain = int((1-test_size)*len(df_robot))
dfTrain = df_robot.iloc[0:nTrain]
dfTest = df_robot.iloc[nTrain:]2 Fit the supporting pwpol implicit model
Recall that we first need to obtain a pwpol model. So we start by setting the parameters for the pwpol model fitting.
from mizopol.pwpol_api import fit as pwpol_fit
# set the parameters of the solution
args = dict(
colX=colX,
coly=coly,
th=0.15,
deg=3,
window=2000,
eps=1e-2,
compute_contributions=True,
th_monomial=1e-5,
eta=50,
)
# fit the pwpol model.
pwpModel, (cpu1, cpu2) = pwpol_fit(df=dfTrain, args=args)3 Fit the xpwpol model
from mizopol.xpwpol_api import fit
# set the parameters of the solution
argsx = dict(
nDiv=500,
nVoters_max=100,
nModesRegions=5,
degPolRegions=3,
qmaxNormalization=99,
nJumpFit=20,
qOpt=95,
revise=True,
contractionFac=0.95,
)
# Use the pwpol obtained above to fit the xpwpol model
model, (cpu1, cpu2) = fit(dfTrain, pwpModel, argsx)A typical log of the xpwpol fit method is given below:
Iter: 0, | error: [0.215, 0.376, 0.488, 0.601, 0.755, 0.903, 1.858] |nVoters: 1
Iter: 17, | error: [0.187, 0.349, 0.456, 0.569, 0.721, 0.86, 2.635] |nVoters: 2where, in this case, only two voters were found appropriate, given the maximum number of attempts allowed by the setting nVoters_max=100.
4 Comparison
The following residuals are computed on the dfTest test dataset for the three representation of normality, namely, the implicit one associated to the use of the pwpol modules and the two explicit representatin (predictive), namely:
- The explicit piece-wise polynomial representation provided by the
xpwpolmodule. - The explicit single polynomial representation provided by the
plarsmodule.
all the representations use polynomials of maximum degree \(3\).
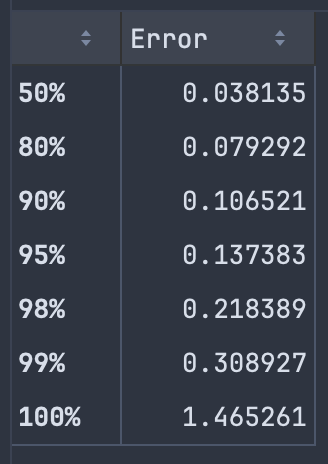
pwpol residuals (Implicit)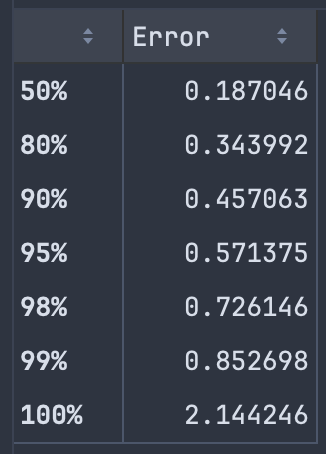
xpwpol residuals (Explicit)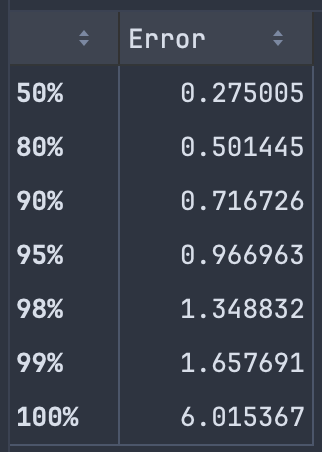
plars residuals (Explicit)These comparisons shows that the xpwpol provides significantly improved precision when compared to a single polynomial explicit representation.